Po dlhom čase námahy a trápenia sa podarilo vytvoriť jednodielny trup pre robota NimbRo-OP2X
Výsledok vyzerá celkom sľubne.
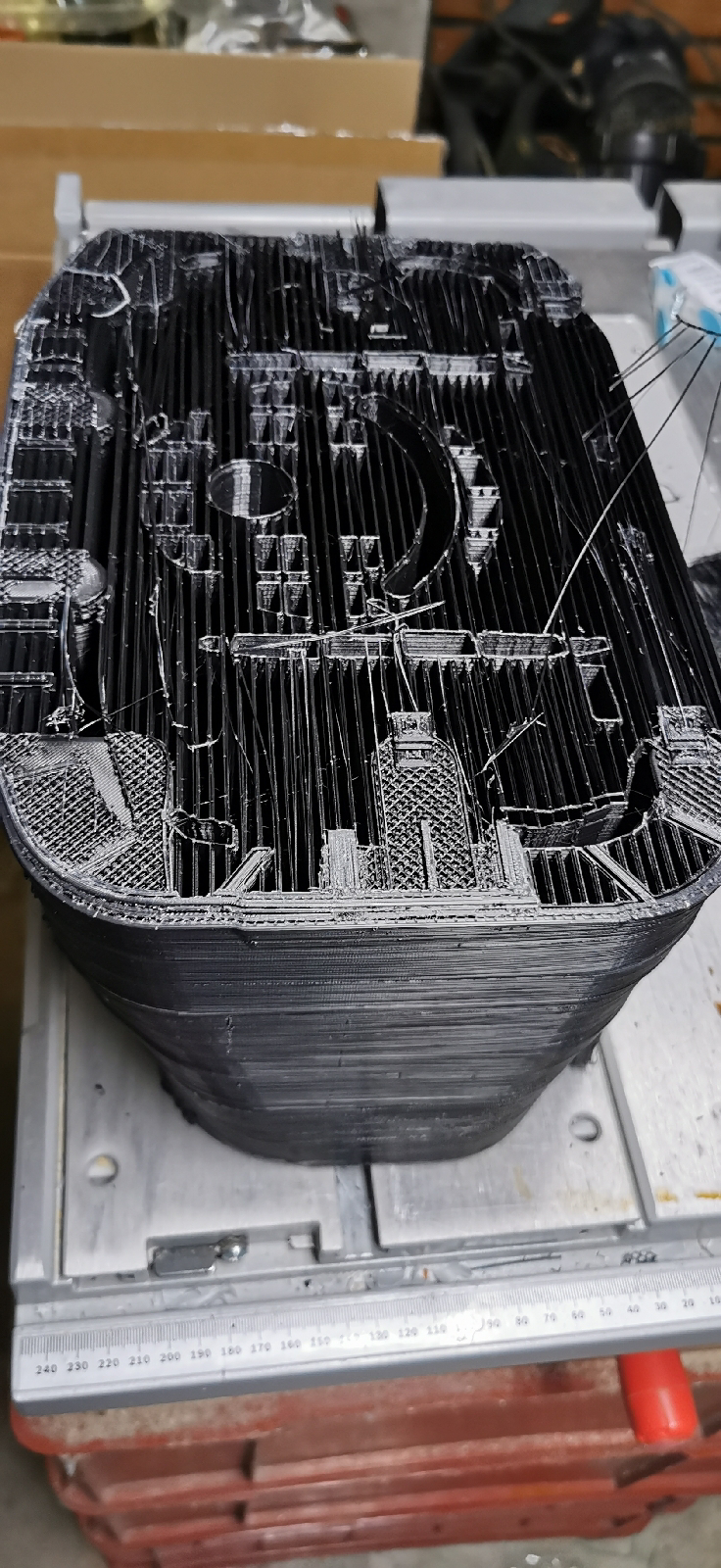
Trup sa mi nedarilo vytlačiť ako jeden kus, vždy sa to pokazilo. Najprv som to tlačil z ABS ale kvôli tomu, že to je dosť veľký diel a vplyvom tepelnej roztažnosti vznikali praskliny. Zároveň ten diel potreboval veľmi veľké množstvo support-materiálu, prakticky celý vnútorný priestor mal byť vyplnený suportom.
Medzivýsledky boli takéto:
Tieto snahy prebiehali koncom jari 2023.
Odhadovaný čas tlače bol vždy okolo 3 týždňov.
Pochopil som, že vytlačiť taký veľký diel z ABS nie je v mojich technických možnostiach.
Preto som rozdelil model trupu na tri menšie diely a pokúšal som sa to vytlačiť tak. Vďaka rozdeleniu sa mi podarilo odbúrať veľké množstvo support-materiálu. Vrchná časť trupu (ramená) mala byť tlačená samostatne a predošlé dve časti nepotrebovali vytvárať support pod ramenami.
Naďalej som skúšal použiť ABS. Ale ABS naďalej prasklo, tak som nakoniec musel uznať, že to vytlačím iba z PLA.
Diely sa teda podarilo vytlačiť a bolo ich treba spojiť pomocou lepidla.
Na lepenie materiálu PLA sa doporučuje používať sekundové lepidlo (kryanoakrylát) spolu s aktivátorom (väčšinou balené ako spray).
Vytvoriť spoje, ktoré by boli dostatočne pevné tiež nebolo jednoduché, lebo spájané plochy neboli úplne rovné, ako som očakával. Opäť sa počas tlače prejavila tepelná rozťažnost a vytlačené diely boli mierne deformované.
Pri kontrole samotných dielov to nebolo vidieť, ale po priložení dielov k sebe sa ukázali medzery. Tieto medzery som vyplnil 3D-perom, opäť prelepil a spoje vybrúsil.
Spoje boli samozrejme velmi viditelné a pôsobili rušivo.
Výsledky zlepenia jednotlivých dielov bol takýto:
Preto som na celý trup na niesol vrstvu automobilového (plastového) tmelu a celý povrch som vybrúsil.
Povrch bol hladký, ale samozrejme opticky pôsobil ešte rušivejšie ako predtým.
Nakoniec som cely trup nastriekal niekoľkými vrstvami čiernej lesklej farby.
Medzičasom som ešte vytlačil vnútorné diely, na ktoré by mala byť uchytená elektronika.
Takisto som vytlačil aj zadné diely, ktoré slúžia ako prístup k elektronike.
Samozrejme namiesto servomotorov som zatiaľ namontoval iba ich nefunkčné vytlačené modely .(mockup).
Výsledný vzhľad robota už nepôsobí takým rušivým dojmom.